

Nema42 Schrittmotor, Schrittmotor, Schrittmotor, Nema42
Nema42 Schrittmotor, Schrittmotor, Schrittmotor,nema42,
nema42, Nema42 Schrittmotor, Schrittmotor, Schrittmotor,
NEMA42 Easy Servo-Serie (NEMA42 Closed-Loop-Serie)
Motorelektrische Parameter:
| Modus | Schrittwinkel | Strom (A) | Widerstand (Ω±10%) | Induktivität (mH±20%) | Haltemoment (Nm) | Motorlänge (mm) | Encoder Auflösung (PPR) | Anwendbarer Treiber |
| 110HCE12N-B39 | 1,2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1,2° | 4.2 | 1,88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
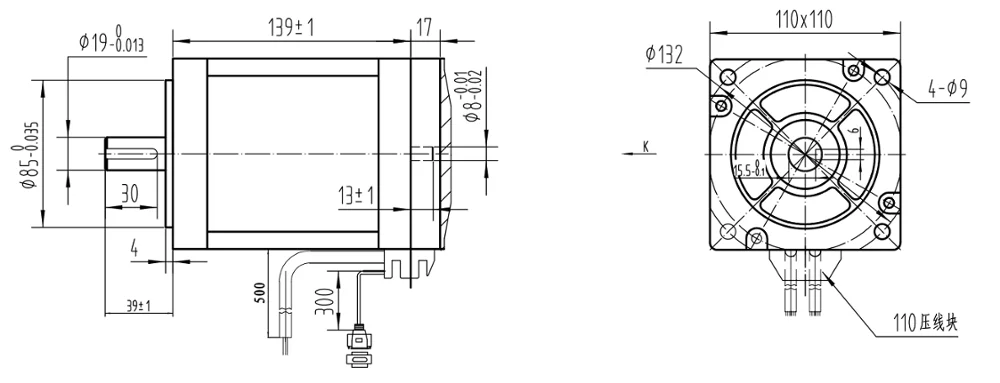
Motorabmessungen: mm
Drehmoment-/Frequenzkurve
Treiber 3HSS2260
Merkmale
1, 32-Bit-DSP und Vektor-Regelungstechnologie
2, ohne Schrittverlust, hohe Positionsgenauigkeit
3, Verbessern Sie das Motorausgangsdrehmoment und die Arbeitsgeschwindigkeit
4, variable Stromsteuerungstechnologie, Motortemperaturanstieg zurückhalten
5, Anpassung an verschiedene mechanische Belastungsbedingungen (einschließlich Riemenscheiben mit geringer Steifigkeit), nein
Sie müssen den Verstärkungsparameter anpassen
6, Reibungslose und zuverlässige Bewegung, geringe Vibration, große Verbesserung bei Beschleunigung und
verlangsamen
7, Die Fähigkeit der Nullgeschwindigkeitsstatik ohne Vibration
8, Anpassung an 3-Phasen-Hybridservomotoren 86 (NEMA34) und 110 (NEMA 42).
9, Maximale Schrittimpulsfrequenz 200 kHz
10, Mikroschritt 400-60000 Impulse/Umdrehung
11, Spannungsbereich AC150-240V
12, Überstrom-, Überspannungs- und Überpositionsschutz
13, Sechs digitale Röhrenanzeige, einfach einzustellende Parameter und Überwachung des Motorbetriebs
Zustand
Mikroschrittauswahl:
| Code | Definition | Reichweite | Standardwert | Anmerkung |
| PA0 | Versionsnummer | 501 | Änderungen sind verboten | |
| PA1 | Auswahl des Steuermodus | 0~2 | 0 | |
| PA2 | Auswahl des Motortyps | 0~2 | 0 | |
| PA3 | Einschaltanzeige | 0~7 | 0 | |
| PA4 | Stromschleife Kp | 0~1000 | 200 | Änderungen sind verboten |
| PA5 | Stromschleife Ki | 0~1000 | 300 | Änderungen sind verboten |
| PA6 | Positionsschleife Kp | 0~1000 | 300 | |
| PA7 | Einstellung der Mikroschritte | 400~60000 | 4000 | |
| PA8 | Encoder-Auflösung (1000) | 4000 | Änderungen sind verboten | |
| PA9 | Encoder-Auflösung (1000) | 40~30000 | 1000 | |
| PA10 | Strom halten | 10~100 | 40 | |
| PA11 | Strom im geschlossenen Regelkreis | 10~100 | 100 | |
| PA12 | Reservierung | |||
| PA13 | Reservierung | |||
| PA14 | Ebene aktivieren | 0/1 | 0 | |
| PA15 | Alarmstufe | 0/1 | 0 | |
| PA16 | Auswahl des Pulsmodus | 0/1 | 0 | |
| PA17 | Pulskante | 0/1 | 0 | |
| PA18 | Motordrehrichtung | 0/1 | 0 | |
| PA19 | JOG-Geschwindigkeit | 1~200 | 60 | |
| PA20 | Abschnitt „PEND-Modus“. | 0/1 | 0 | |
| PA21 | PEND-Ebene | 0/1 | 0 |
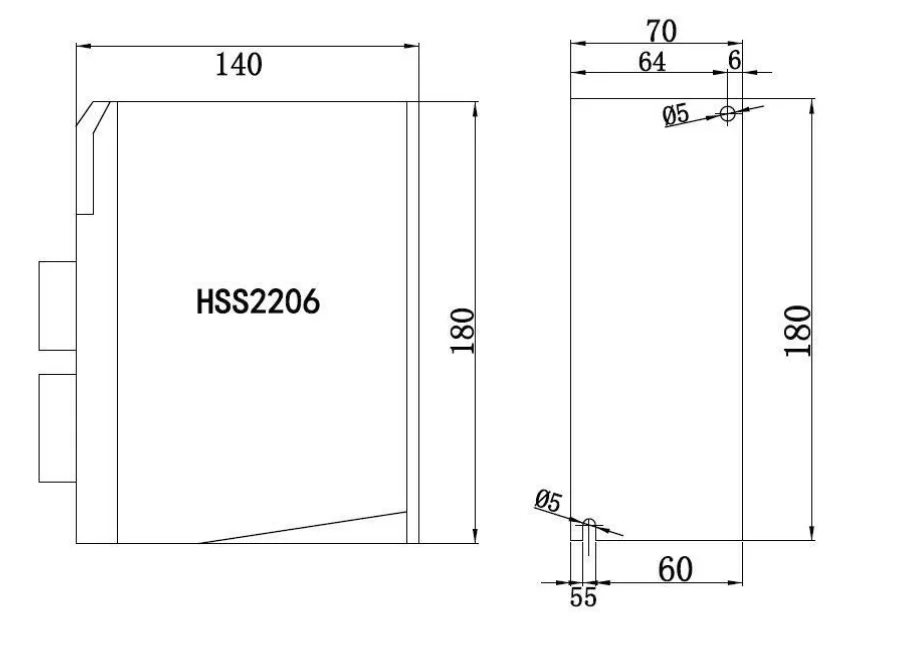
Treiberabmessung (mm):
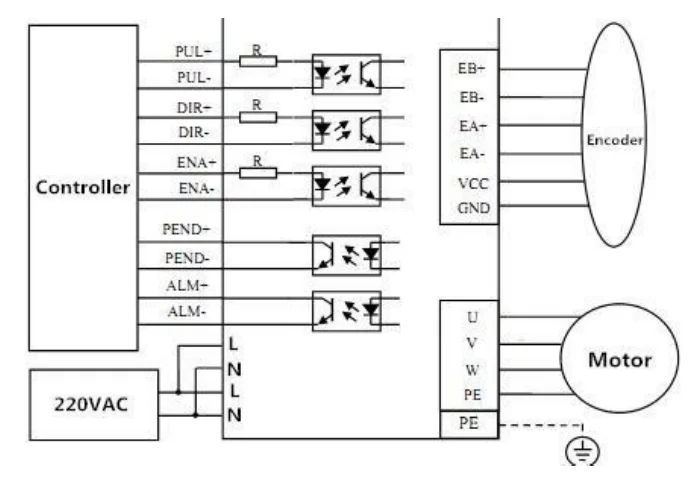
Schaltplan:
nema42Schrittmotor ,
Schrittmotor,
Schrittmotor,
nema42



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
